
 |
A P. 5264. feladat (2020. november) |
P. 5264. Egy versenyautó 60 m sugarú, kör alakú tesztpályán álló helyzetből indul. Érintőleges gyorsulása a mozgás első négy másodpercében állandó, nagysága 6 m/s2.
a) Határozzuk meg és ábrázoljuk vázlatosan az idő függvényében, hogy mekkora szögsebességgel forog az autó gyorsulásvektora a menetirányhoz képest!
b) Mennyi idő múlva lesz ez a szögsebesség a legnagyobb? Mekkora lesz ez a maximális szögsebesség?
Közli: Szabó Endre, Vágfüzes, Szlovákia
(5 pont)
A beküldési határidő 2020. december 15-én LEJÁRT.
I. megoldás. a) SI-egységeket használva:
– az autó érintőleges gyorsulása a1=6;
– a pálya sugara: r=60;
– az autó sebessége t idő elteltével v=a1t=6t;
– az autó centripetális gyorsulása: a2=v2r=0,6t2. Az autó gyorsulásvektora a kör érintőjével
α(t)=arctga2a1=arctg(0,1t2)
szöget zár be. Ennek a szögnek az egységnyi időre vonatkozó megváltozása a keresett
ω(t)=ΔαΔt
szögsebesség.
Számítsuk ki, hogy mennyit változik tgα egy kicsiny Δt idő alatt, ha eközben az α szög Δα-val nagyobb lesz. Mivel tgα=0,1t2, fennáll, hogy
tg(α+Δα)−tgα=0,1(t+Δt)2−0,1t2.
Kicsiny változások esetén érvényes
tg(Δα)≈ΔαésΔt≪t.
Trigonometriai és algebrai átalakítások után kapjuk, hogy ebben a közelítésben
tgα+Δα1−Δα⋅tgα−tgα=0,2tΔt+0,1(Δt)2,
azaz
Δα(1+tg2α)=Δt(0,2t+0,1tΔt)(1−Δαtgα).
Innen kapjuk, hogy a keresett szögsebesség:
ω(t)≈ΔαΔt=0,2t+0,1Δt1+tg2α(1−Δα⋅tgα)=0,2t1+0,01t4.
Ha ábrázoljuk az ω(t) függvényt, a grafikonról leolvashatjuk, hogy a szögsebességnek t=2,4 s közelében maximuma van, és hogy a szögsebesség legnagyobb értéke ωmax=0,36s−1.
Megjegytés. ω(t) szélsőértékét deriválással is meghatározhatjuk: A differenciálhányados t0=4√100/3≈2,4 s idő elteltével lesz nulla, és ωmax=ω(t0)≈0,36s−1.
II. megoldás. A feladat elemi úton (a differenciálszámítás felhasználása nélkül) is megoldható. Az autó inerciarendszerbeli a gyorsulásvektora az autóhoz rögzített (tehát egyenletes gyorsuló szögsebességgel forgó) (X,Y) koordináta-rendszerben a=(a1,a2) módon adható meg (1. ábra), ahol – az I. megoldás elején leírtaknak megfelelően
a1=6ésa2=0,6t2.
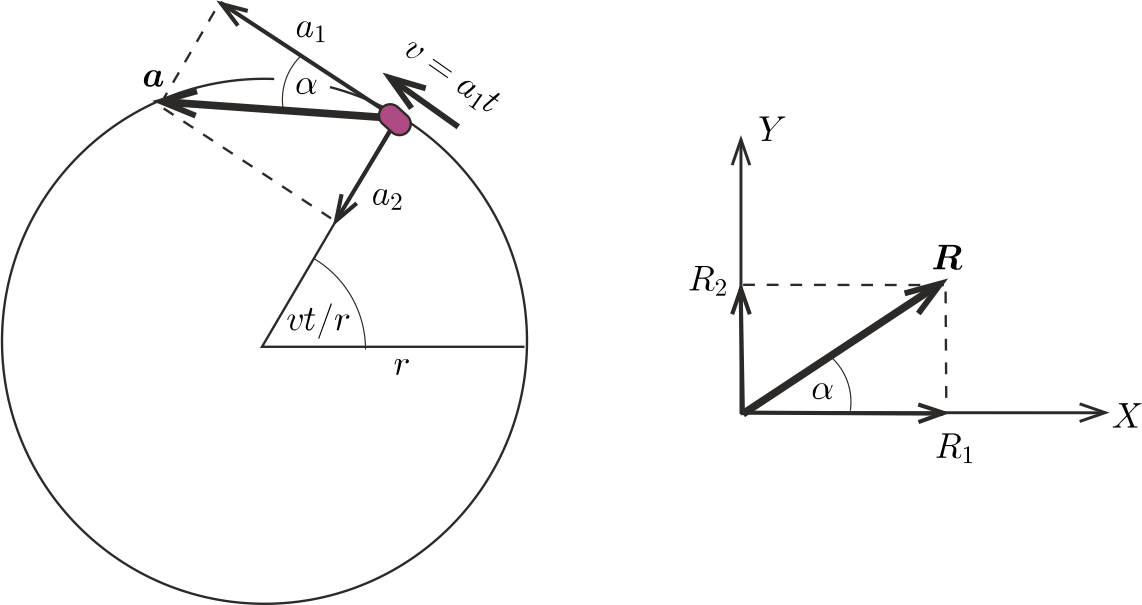
1. ábra
A továbbiakban a gyorsulásvektort R-rel, ezen vektor változási sebességét V-rel, ez utóbbi változási sebességét (vagyis a R gyorsulását) A-val fogjuk jelölni. (Az átjelölés oka: el akarjuk kerülni a V vektornak és az autó v sebességvektorának, valamint A-nak és a-nak esetleges összetévesztését.) Ennek megfelelően írhatjuk, hogy
R1=6,R2=0,6t2.
Ráismerhetünk, hogy ezek éppen egy olyan test koordinátái, amely az Y tengely irányában egyenletesen gyorsuló mozgást végez 1,2 nagyságú gyorsulással. Így tehát
V1=0,V2=1,2t,
és
A1=0,A2=1,2.
Az R vektor nagyságát jelölje R, az autó haladási irányával (vagyis az X tengellyel) bezárt szöge pedig legyen α. Ennek megfelelően
| (1) | R=√R21+R22=6√1+0,01t4, |
továbbá
| (2) | cosα=R1R=1√1+0,01t4 |
és
sinα=R2R=0,1t2√1+0,01t4.
a) A V vektort nemcsak az X,Y koordinátákkal, hanem R irányú Vrad ,,radiális'' és arra merőleges Vtan ,,tangenciális'' komponensekkel is jellemezhetjük (2. ábra).
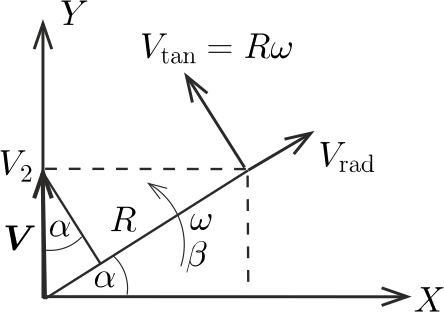
2. ábra
Az ábráról leolvashatjuk, hogy
Vrad=V2sinα=1,2t0,1t2√1+0,01t4=0,12t3√1+0,01t4,
valamint
| (3) | Vtan=Rω=V2cosα=1,2t√1+0,01t4, |
tehát a kérdéses szögsebesség:
| (4) | ω=VtanR=0,2t1+0,01t4. |
b) A fentebb leírtakhoz hasonlóan járhatunk el az A vektorral is (3. ábra).
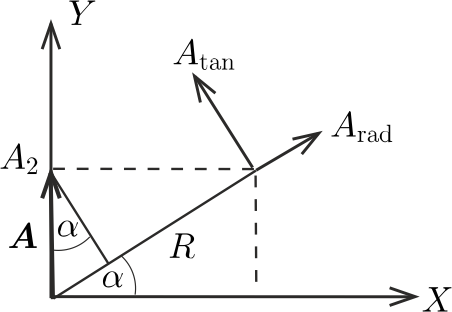
3. ábra
Itt azonban figyelembe kell vegyük, hogy a radiális és a tangenciális komponensek, valamint az (A1,A2) komponensek közötti kapcsolat a forgásból származó extra tagokat is tartalmaz:
Arad=ΔVradΔt−Rω2,
ahol a jobb oldal második tagja a centripetális gyorsulás, valamint
| (5) | Atan=Rβ+2Vradω, |
ahol a jobb oldal második tagja a Coriolis-gyorsulás.
Megjegyzás. Egy m tömegű test forgó koordináta-rendszerbeli mozgásegyenletében a centrifugális erő a centripetális gyorsulás (−m)-szerese, a Coriolis-erő pedig a Coriolis-gyorsulás (−m)-szerese. (Lásd pl. a Négyjegyű függvénytáblázatokban a tehetetlenségi erők képleteit.)
Abban a t0 pillanatban, amikor az ω szögsebesség a legnagyobb, a β szöggyorsulás nulla, így (1-5) egyenletekből következően
A2cosα=2Vradω,
azaz
1,2⋅1√1+0,01t40=2⋅0,12t30√1+0,01t40⋅0,2t0 1+0,01t40.
Innen
0,04t40=1+0,01t40,azazt0=4√10,03≈2,4 [s],
a szögesbesség legnagyobb értéke pedig
ωmax=ω(t0)=3204√1003≈0,36 [s−1].
Statisztika:
40 dolgozat érkezett. 5 pontot kapott: Bonifert Balázs, Fekete András Albert, Fey Dávid, Fonyi Máté Sándor, Gurzó József, Horváth 999 Anikó, Jánosik Máté, Juhász Márk Hunor, Kertész Balázs, Kovács Kinga, Ludányi Levente, Molnár-Szabó Vilmos, Németh Kristóf, Sas 202 Mór, Schäffer Bálint, Selmi Bálint, Simon László Bence, Somlán Gellért, Takács Bendegúz, Téglás Panna, Tóth Ábel, Varga Vázsony. 4 pontot kapott: Koleszár Benedek, Köpenczei Csanád, Magyar Gábor Balázs, Mihalik Bálint, Molnár 123 Barnabás, Toronyi András. 2 pontot kapott: 8 versenyző. 1 pontot kapott: 2 versenyző. 0 pontot kapott: 2 versenyző.
A KöMaL 2020. novemberi fizika feladatai
|
|